咨询热线:400-999-3607
INTRODUCTION
协作机器人(collaborative robot),简称cobot或co-robot,也叫合作机器人。这是一个比较新的概念,2014年左右才兴起。顾名思义协作机器人是一种能够和人类在共同工作空间中进行近距离互动、帮助人们工作的机器人。
随着市场需求对机器人的柔性要求越来越高,经济实惠、即插即用、编程简单直观、高精度、高安全性的协作机器人正逐渐成为制造业、零售业的宠儿。
在人机协作模式下,人与机器携手合作。由人员控制并监控生产,而机器人则负责劳累的体力工作。两者发挥各自的专长:工业4.0的一个重要原则。人机协作给未来工厂中的工业生产和制造带来了根本性的变革。
我们人类与机器人可以是一种互助共存的关系。机器人可辅助人类去做一些繁复、深重的工作。人类可根据现实需求,调整机器人生产。协作工业机器人是发展的新形态,业内目前已经达成共识:人机协作是机器人进化的必然选择,其特点是安全、易用、成本低,普通工人可以像使用电器一样操作它。

Characteristics

Advantage
• 保护性停止
• 输出力、功率限制
• 自碰撞检测
• 保障协同工作者安全
• 保障工件与生产设备的安全
• 保障机器人自身安全
• Elfin系列机器人支持任意角度的安装,重新部署只需要极短的时间,非常适应小批量、定制化、短周期的生产,是自动化改造的较好选择
• 图形化的机器人示教界面直观易懂,只需要简单的培训即可上手为机器人编程。
• Elfin具备牵引示教功能,除了可以将机器人末端拖动到所需要的位置,轻松示教机器人工作的点位,还可以将牵引示教拖动的轨迹记录下来,极大地节省了编程示教的时间
• 控制器与机器人关节采用EtherCAT通信,使系统具 有优良的控制性能和强悍的抗干扰能力。
• 具有独特的运动学结构,使机器人具有极高的灵活性。
• 高力矩密度,低齿槽力的力矩电机设计,和驱动 配合,为机器人提供好的性能和平稳性。
• 开源ROS接口,用户可以在ROS环境下通过EtherCAT 实时控制机器人关节。
• 利用ROS平台,极大地提高机器人的可扩展性,并且可 以不必依赖额外的控制箱来控制机器人。
application
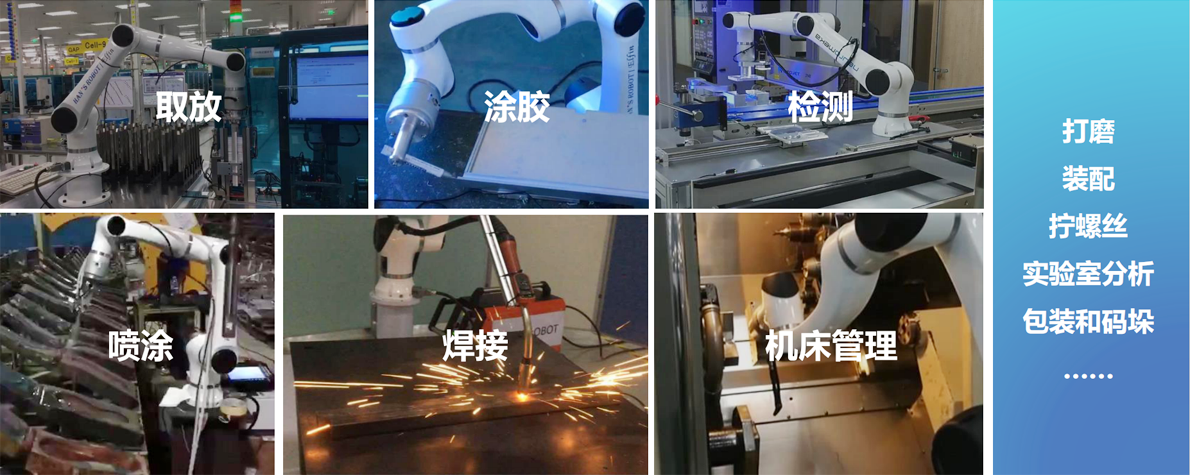
application

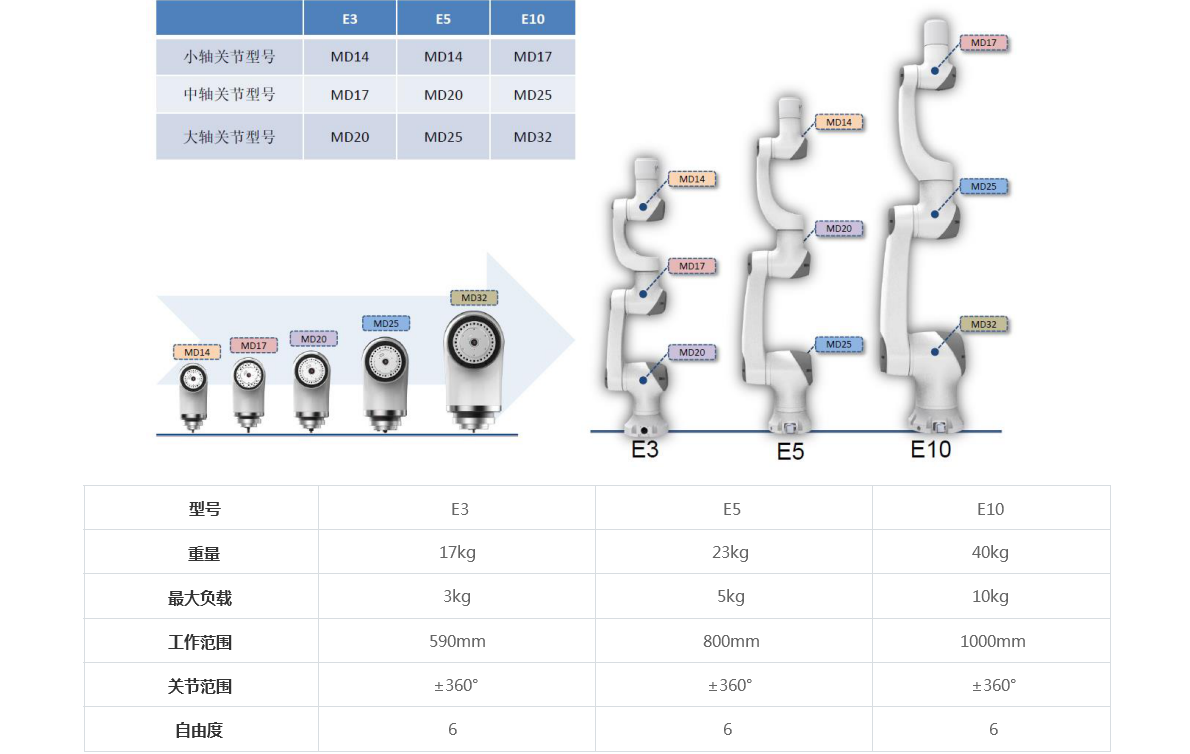
product
CUSTOMER